1, 传感器原理

按被测物理量划分的传感器,常见的有:温度传感器、湿度传感器、压力传感器、位移传感器、流量传感器、液位传感器、力传感器、加速度传感器、转矩传感器等。按工作原理可划分为:1. 电学式传感器 电学式传感器是非电量电测技术中应用范围较广的一种传感器,常用的有电阻式传感器、电容式传感器、电感式传感器、磁电式传感器及电涡流式传感器等。电阻式传感器是利用变阻器将被测非电量转换为电阻信号的原理制成。电阻式传感器一般有电位器式、触点变阻式、电阻应变片式及压阻式传感器等。电阻式传感器主要用于位移、压力、力、应变、力矩、气流流速、液位和液体流量等参数的测量。电容式传感器是利用改变电容的几何尺寸或改变介质的性质和含量,从而使电容量发生变化的原理制成。主要用于压力、位移、液位、厚度、水分含量等参数的测量。电感式传感器是利用改变磁路几何尺寸、磁体位置来改变电感或互感的电感量或压磁效应原理制成的。主要用于位移、压力、力、振动、加速度等参数的测量。磁电式传感器是利用电磁感应原理,把被测非电量转换成电量制成。主要用于流量、转速和位移等参数的测量。电涡流式传感器是利用金属在磁场中运动切割磁力线,在金属内形成涡流的原理制成。主要用于位移及厚度等参数的测量。2. 磁学式传感器磁学式传感器是利用铁磁物质的一些物理效应而制成的,主要用于位移、转矩等参数的测量。3. 光电式传感器光电式传感器在非电量电测及自动控制技术中占有重要的地位。它是利用光电器件的光电效应和光学原理制成的,主要用于光强、光通量、位移、浓度等参数的测量。4. 电势型传感器电势型传感器是利用热电效应、光电效应、霍尔效应等原理制成,主要用于温度、磁通、电流、速度、光强、热辐射等参数的测量。5. 电荷传感器电荷传感器是利用压电效应原理制成的,主要用于力及加速度的测量。6. 半导体传感器半导体传感器是利用半导体的压阻效应、内光电效应、磁电效应、半导体与气体接触产生物质变化等原理制成,主要用于温度、湿度、压力、加速度、磁场和有害气体的测量。7. 谐振式传感器谐振式传感器是利用改变电或机械的固有参数来改变谐振频率的原理制成,主要用来测量压力。8. 电化学式传感器电化学式传感器是以离子导电为基础制成,根据其电特性的形成不同,电化学传感器可分为电位式传感器、电导式传感器、电量式传感器、极谱式传感器和电解式传感器等。电化学式传感器主要用于分析气体、液体或溶于液体的固体成分、液体的酸碱度、电导率及氧化还原电位等参数的测量。
2, 机器人的工作原理是什么

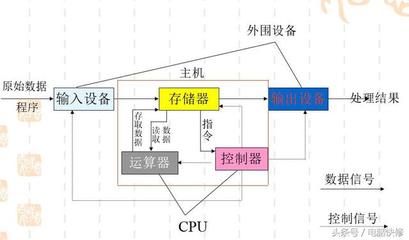
机器人的工作原理 从最基本的层面来看,人体包括五个主要组成部分: 身体结构 肌肉系统,用来移动身体结构 感官系统,用来接收有关身体和周围环境的信息 能量源,用来给肌肉和感官提供能量 大脑系统,用来处理感官信息和指挥肌肉运动 机器人的组成部分与人类极为类似。一个典型的机器人有一套可移动的身体结构、一部类似于马达的装置、一套传感系统、一个电源和一个用来控制所有这些要素的计算机“大脑”。从本质上讲,机器人是由人类制造的“动物”,它们是模仿人类和动物行为的机器。机器人是“能自动工作的机器”,它们有的功能比较简单,有的就非常复杂,但必须具备以下三个特征: 身体 是一种物理状态,具有一定的形态,机器人的外形究竟是什么样子,这取决于人们想让它做什么样的工作,其功能设定决定了机器人的大小、形状、材质和特征等等。 大脑 就是控制机器人的程序或指令组,当机器人接收到传感器的信息后,能够遵循人们编写的程序指令,自动执行并完成一系列的动作。控制程序主要取决于下面几种因素:使用传感器的类型和数量,传感器的安装位置,可能的外部激励以及需要达到的活动效果。 动作 就是机器人的活动,有时即使它根本不动,这也是它的一种动作表现,任何机器人在程序的指令下要执行某项工作,必定是靠动作来完成的。
名词解释
传感器
传感器(英文名称:transducer/sensor)是一种检测装置,能感受到被测量的信息,并能将感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求。 传感器的特点包括:微型化、数字化、智能化、多功能化、系统化、网络化。它是实现自动检测和自动控制的首要环节。传感器的存在和发展,让物体有了触觉、味觉和嗅觉等感官,让物体慢慢变得活了起来。通常根据其基本感知功能分为热敏元件、光敏元件、气敏元件、力敏元件、磁敏元件、湿敏元件、声敏元件、放射线敏感元件、色敏元件和味敏元件等十大类。
测量
测量是按照某种规律,用数据来描述观察到的现象,即对事物作出量化描述。测量是对非量化实物的量化过程。 在机械工程里面,测量指将被测量与具有计量单位的标准量在数值上进行比较,从而确定二者比值的实验认识过程。