



 会员
会员
GY-39 光强度 温度 湿度 大气压传感器 一体模块 ,直接串口输出
资料下载 https://pan.baidu.com/s/1hrOnGTe
1,可以当做单纯的简单MAX44009或者BME280模块使用,芯片i2c通信。
2,可以用模块上MCU读取各种数据,MCU计算后统一直接输出计算后的实用数据 ,支持串口/i2c
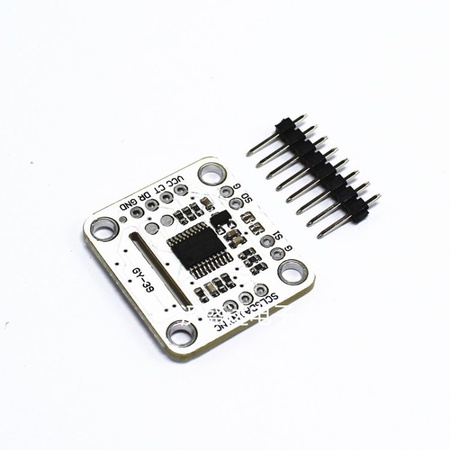
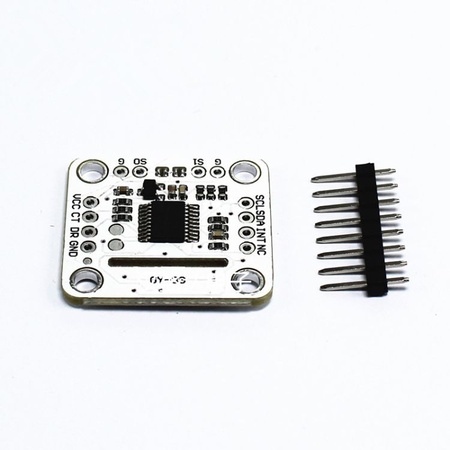
名称:4合1气象站模块(光强度+温湿度+大气压强模块)
型号:GY-39
使用芯片:MAX44009+BME280+MCU
供电电源:3-5v
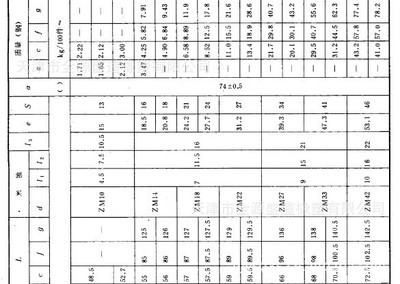
模块尺寸:24.3*26.7mm
通信方式:MCU_IIC/MCU_串口/传感器芯片串口
带完美上位机软件:

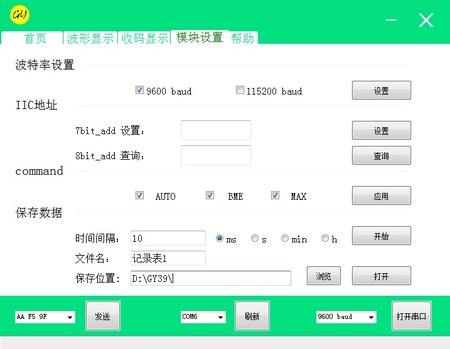

串口
串行接口(SerialInterface)简称串口,也称串行通信接口或串行通讯接口(通常指COM接口),是采用串行通信方式的扩展接口,指数据一位一位地顺序传送。 串行接口的特点是通信线路简单,只要一对传输线就可以实现双向通信(可以直接利用电话线作为传输线),从而大大降低了成本,特别适用于远距离通信,但传送速度较慢。常见的有一般计算机应用的RS-232(使用 25 针或 9 针连接器)和工业计算机应用的半双工RS-485与全双工RS-422。
GY
GY,是雅戈尔旗下的休闲服饰品牌。它由国际时尚设计团队,以“摩登、性感、酷”为三大品牌诉求,专为22-35岁的现代青年男士而设计,它秉承了雅戈尔男装用料考究,做工严谨,价格合理的传统,同时融入了W-GAME的国际潮流设计元素,浓缩了高尚的内涵和时尚表达,在多种场合都能打造潇洒出众的个性形象。09秋冬男装涵盖了“时尚商务、时尚休闲、牛仔水洗”三大系列,高尚的品质和时尚的表达,呈现出自信男人的简约和性感。
39
39是38与40之间的自然数。 39还是奇数、合数。 质因数分解3×13 罗马数字XXXIX 二进制表示100111 八进制表示47 十六进制表示27
相关问答
arduino控制GY521源代码
//从串口得到GY521 MPU6050的数据#include "Wire.h"#include "I2Cdev.h"#include "MPU6050.h"MPU6050 accelgyro;int16_t ax, ay, az;int16_t gx, gy, gz;float C_Z = -1343.91;//Z轴零点偏移量float C_Gyro = -99.90;//陀螺仪零点偏移量float Z_Min = -17873.76;//最小极值float Z_Max = 15186.91;//最大极值float T_Z = 3;//Z轴角度补偿时间常数float R_Z = 180/(Z_Max - Z_Min);//Z轴比例float R_Gyro = 0.081;//陀螺仪比例unsigned long T_Now =0;//系统当前时间unsigned long T_Last;//上次时间float Angle_G,Angle_AG,Angle_GG;int i;float GYRO;void setup() {Wire.begin();Serial.begin(38400);// initialize deviceSerial.println("Initializing I2C devices...");accelgyro.initialize();// verify connectionSerial.println("Testing device connections...");Serial.println(accelgyro.testConnection() ? "MPU6050 connection successful" : "MPU6050 connection failed");}void loop() {accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); //读取6050数据if (i>20){GYRO = GYRO/20;float Angle_Z = (az-C_Z)*R_Z;//加速度计 角度计算 (读取值-偏移量)*比例 单位:°Angle_G = -(GYRO-C_Gyro)*R_Gyro;//陀螺仪采样 (采样值-偏移量)*比例 单位:°/sAngle_AG = Angle_AG + (((Angle_Z-Angle_AG)*1/T_Z)+Angle_G)*0.005;//滤波Angle_GG = Angle_GG + Angle_G*0.005;//陀螺仪对X轴积分 得出角度。Serial.print(Angle_Z);Serial.print(",");Serial.print(Angle_GG);Serial.print(",");Serial.print(Angle_AG);Serial.print("\n");i=0;}GYRO = GYRO + gx;i++;}
- 联系人 颜汉民
- 联系电话 13510204932
- 公司地址 中国广东深圳福田区华强北街道华航社区振华路159号高科德电子市场夹1层A2816
工商信息
| 注册号: | 91440300MA5FAHMP5X |
| 组织机构代码: | - |
| 税务登记证号: | - |
| 法定代表人: | 颜汉民 |
| 经营状态: | 开业 |
| 成立日期: | 2018-09-10 |
| 营业期限: | 长期有效 |
| 年检日期: | - |
| 注册资本: | 100万(元) |
| 企业类型: | 有限责任公司(自然人独资) |
| 机构类型: | - |
| 所属行业: | - |
| 行政区划: | 广东省深圳市福田区 |
| 电话号码: | - |
| 登记机关: | 福田局 |
| 所在地址: | 深圳市福田区华强北街道华航社区振华路159号高科德电子市场夹1层A2816 |
| 经营范围: | 电子元器件、电子产品、集成电路、数码产品及配件、通讯产品及配件、计算机及配件、光电材料的批发及零售;电子产品的研发及销售;国内贸易,经营进出口业务。(以上法律、行政法规、国务院决定禁止的项目除外,限制的项目须取得许可后方可经营)^ |