搭载丰富功能,高速机器人动作节拍。
对应新型控制柜DX200。
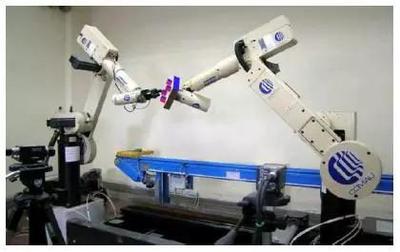
6轴垂直多关节
负载:50Kg
动态范围:2061mm
控制柜:DX200
用途:搬运、取件/包装、码垛、组装/分装、喷涂
特点
l 中型负载,适用范围广
l 全轴低功率输出,无需设置安全栅栏,设备构成简易
搭配新型控制柜DX200,安全性提升,功能丰富
机器人型号 | MH50Ⅱ | |
适用控制柜 | DX200 | |
设置*1 | F,W,C | |
自由度 | 6 | |
可搬质量 | 50kg | |
垂直伸长度 | 3875mm | |
水平伸长度 | 2061mm | |
重复定位精度*2 | ±0.07mm | |
动作范围 | S轴(旋转) | -180° ~ +180° |
L轴(下臂) | -90° ~ +135° | |
E轴(肘) | - | |
U轴(上臂) | -170° ~ +251° | |
R轴(手腕旋转) | -360° ~ +360° | |
B轴(手腕摆动) | -125° ~ +125° | |
T轴(手腕回转) | -360° ~ +360° | |
最大速度 | S轴(旋转) | 180°/s |
L轴(下臂) | 178°/s | |
E轴(肘) | - | |
U轴(上臂) | 178°/s | |
R轴(手腕旋转) | 250°/s | |
B轴(手腕摆动) | 250°/s | |
T轴(手腕回转) | 360°/s | |
容许力矩 | R轴(手腕旋转) | 216N.m |
B轴(手腕摆动) | 216N.m | |
T轴(手腕回转) | 147N.m | |
容许惯性力矩 | R轴(手腕旋转) | 28kg.㎡ |
B轴(手腕摆动) | 28kg.㎡ | |
T轴(手腕回转) | 11kg.㎡ | |
本体质量 | 550kg | |
电源容量*3 | 4.0kVA | |
*1:F=置地式,W=挂壁式,C=倒挂式,S=支架式(挂壁式时,S轴的动作会有限制,请注意。)
*2:JIS B 8432为基准。
*3:因用途,动作模式而异。
*4:只限搬运用途。
*5:超过1KG的情况因动作范围有异。请根据对应的负载使用正确的动作范围。
*6:MH6F的时候是1.0kVA。
*7:HP20F的时候是1.5kVA。
*8:斜线部分表示的是S轴在-40° ~ +30°的时候P点无法动作的范围。



码垛
码垛:堆放物品的一种机器。
抓手
“抓手”是近几年出现频率较高的新词之一,尚未被《现代汉语词典》收入。 “抓手”的原义是指人手可以把持(抓握)的部位,只要把手“抓”在上面,人便有了依托,有了凭借,如果没有“抓手”,某些活动和工作就无法开展。买电视机,纸箱上有“抓手”。乘公共汽车,车厢里有“抓手”。包装后的商品和礼品,都有“抓手”。各种机械和工具,没有抓手,人就无法操控。
全自动
全自动是指机械装置和产品生产、加工操作的全面自动化。当前,随着计算机技术的高度普及,工业产品制造、零部件加工、人类社会生活产品等产业已全部进入到了由计算机可编程控制的全方位自动化生产时代。另外,在军工方面、航天设备、科研、农业、电力等行业也全部实施了由计算机辅助生产的全面自动化。也可以说,“全自动”一词的解释,也是在工农业生产中不靠人工而由机器装置自动操作的一种过程。