1, 谁能给个IGBT驱动的应用电路图?
1. 驱动器的工作电压Vp一般为24V。2. 5V电平输入信号可直接连接,如信号的高电平Vim高于5V,应在输入端串连一个电阻Ri和电容Ci,Ri使输入电流为Ipwm,即Ri=(Vim-Vpwm)/Ipwm)=(Vim-5)/10mA;Ci=470pF。3. 最高工作频率与负载和驱动器周围的环境温度有关,实验表明在100℃、100KHz和100n负载的极限情况下驱动器能够正常工作,但为了长期可靠地工作,还是不要超过参数表的范围,并在负载重、环境温度高时适当降低工作频率。4. 触发过流保护动作时的7脚对16脚的电压。当7脚对16脚(即IGBT的发射极)的电位升高到7.5V时启动内部的保护机制,在6、16脚间接一个电阻Rn可以降低过流保护的阈值。具体关系是Rn/Vn(KΩ/V)=∞/7.5,220/7,100/6.4,68/6,47/5.6,36/5.1,27/4.7,22/4.3,18/3.9,15/3.6,12/3.2,10/2.8,8.2/2.5。为安全起见,用户调试时可以先接比预算值稍小的电阻,提高保护灵敏度。5. 检测到IGBT集电极的电位高于保护动作阈值后到开始降栅压的时间。因为各种尖峰干扰的存在,为避免频繁的保护影响开关电源的正常工作,设立盲区是很有必要的。在5、16脚间接一个电容Cblind可以调大盲区时间,关系为Cblind/Tblind(pF/μS)=0/0.4,47/0.6,68/1.1,100/1.8,150/2.8。一般情况下可设置在2-4μS左右。6. 初始栅压开始降低Vdrop到驱动器开始软关断IGBT之间的时间。在Tdelay时间内,如果过流信号消失,则驱动器认为这种过流不属于真正的短路,无需中断电源的正常工作,从而恢复原来的驱动电平。如果过流信号继续存在,则将进入软关断的进程。在8和16脚间接一个电容Cdelay,可以设定延迟判断时间Tdelay,在Vp=24V时的关系为Cdelay/Tdelay(pF/μS)=0/1.4,47/2.4,100/4.1,150/5.5,220/7.8。一般情况下可设置在2-4μS左右。7. 驱动脉冲电压从Voh-Vdrop降到0电平的时间。在11、16脚接一个电容Csoft,可加大软关断时间,在Vp=24V时的关系为Csoft/Tsoft(nF/μS)=0/2.2,2.2/3.5,4.7/4.6,10/7。一般情况下可设置在3-4μS左右。软关断开始后,驱动器封锁输入PWM信号,即使PWM信号变成低电平,也不会立即将输出拉到正常的负电平,而要将软关断断过程进行到底。软关断开始的时刻,驱动器的12脚输出低电平报警信号,一般要接一个光耦PE,将信号传送给控制电路。8. 短路故障发生后,驱动器软关断IGBT,如果控制电路没有采取动作,则驱动器再次输出驱动脉冲的间隔时间。在13、16脚接一个电容Creset,可延长再次启动的时间,在Vp=24V时的关系为Creset/Trst(nF/mS)=0/1.15,1/2.3,2/3.45,基本线性关系。应用连接图 滤波电容Cc、Ce、Cp可用22~47μF电解电容、再各并联一个1μ以上的CBB电容,耐压Cc、Ce>=25V,Cp>=35V。2. 电容Cblind、Creset、Cdrop、Cdelay、Csoft根据具体要求设计。如果主电路是单管电路,PE可以不用,同时应将复位时间Trst调到较大数值,以保护IGBT。3. Rg=2.2-22Ω。Rg+控制栅极的充电速度,Rg-控制放电速度,可以短路17、18脚只用一个。4. 隔离反馈二极管Dhv应选用高压快恢复管,如HER107、FUR1100等。5. KA101短路保护特性的测试请参见:短路保护功能测试 。6. 静态输出波形的测试请参见:正常输出波形的测试。
2, IGBT的驱动电路
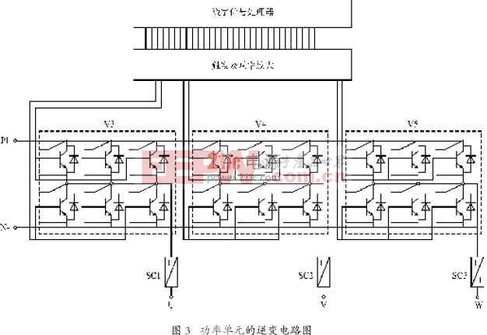
1. 这个模块里面已经集成了驱动电路,就是图中的pre-driver,上桥臂三个,三个下桥臂共用一个。准确说这个应该是一个IPM模块,而非IGBT模块,他们的区别就在于是否集成了驱动电路。2. 驱动电路顾名思义,就是驱动IGBT的:将输入的PWM信号转化成可以开通和关断IGBT的电平标准;使得驱动电流足以可以开通和关断IGBT(尤其是IGBT的Ice较大的时候);使得PWM信号的上升时间和下降时间满足IGBT开通关断的要求。另外,驱动电路还应该具备必要的保护功能,避免IGBT损坏。3. 驱动电路有现成的,正如楼上所说。
名词解释
驱动器
驱动器(driver)从广义上指的是驱动某类设备的驱动硬件。在计算机领域,驱动器指的是磁盘驱动器。通过某个文件系统格式化并带有一个驱动器号的存储区域。存储区域可以是软盘、CD、硬盘或其他类型的 磁盘。单击“Windows资源管理器”或“ 我的电脑”中相应的图标可以查看驱动器的内容。驱动器在整个控制环节中,正好处于主控制箱(MAIN CONTROLLER)-->驱动器(DRIVER)-->马达(MOTOR)的中间换节。 主要功能是,接收来自主控制箱的信号,然后将信号进行处理再转移至马达以及和马达有关的感应器,并且将马达的工作情况反馈至主控制箱。
16
16(十六),是15与17之间的自然数。 16是4的 平方。
电容
电容器,通常简称其容纳电荷的本领为电容,用字母C表示。定义1:电容器,顾名思义,是‘装电的容器’,是一种容纳电荷的器件。英文名称:capacitor。电容器是电子设备中大量使用的电子元件之一,广泛应用于电路中的隔直通交,耦合,旁路,滤波,调谐回路,能量转换,控制等方面。定义2:电容器,任何两个彼此绝缘且相隔很近的导体(包括导线)间都构成一个电容器。 电容与电容器不同。电容为基本物理量,符号C,单位为F(法拉)。 通用公式C=Q/U平行板电容器专用公式:板间电场强度E=U/d ,电容器电容决定式 C=εS/4πkd 随着电子信息技术的日新月异,数码电子产品的更新换代速度越来越快,以平板电视(LCD和PDP)、笔记本电脑、数码相机等产品为主的消费类电子产品产销量持续增长,带动了电容器产业增长。





















