1, 求钢筋弯曲机接线图 一个脚踏板 三个行程开关 两个CJT1
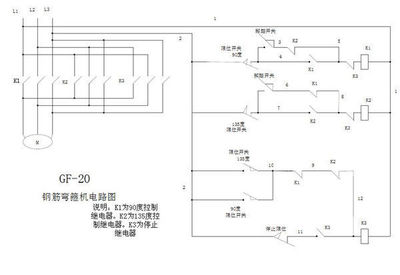
三个行程开关分别是0",90",180"。0"行程开关接常闭与脚踏开关常开并联,二者最好再接一个急停开关(接常闭)。90"接常闭并联一个开关,可以在90"与180"之间转换(本人用了五个行程开关,分别为0"60"90"120"180",还可以再加)180"也接常闭,与前者串联。再,接正转接触器线圈与反转接触器(接触器型号为1201)的常闭辅助触头,此为正转,要加自锁。反转经0"行程开关,急停开关,正转接触器常开辅助触头与反转接触器线圈相接,反转也有加自锁。90"接常闭并联的开关处于关的位置时,踩下脚踏开关,电机正转,到90"时,正转断开,电机自动反转。到0"位置时自动停止。90"接常闭并联的开关处于开的位置时,踩下脚踏开关,电机正转,到180"时,正转断开,电机自动反转。到0"位置时自动停止。
2, 钢筋弯曲机电路图
2 )标准机箱:主要支持结构的底盘是汽车外壳。工具钢燃料棒用于连接马达住房和聚乙烯板提供越来越多的电子结构和更多的镀或皮肤(图4 ) 。电子暂停从铝板的中心结构和分离休克橡胶衬套在每一个角落。横向汽车连接三个钢筋允许捻度之间的左,右两侧的底盘。使用电动机外壳和钢筋创建一个高度兼容的结构,能够以弯曲和伸缩需要保持三叶车轮与地面接触。 湾电气设计 电气设计是由五个主要部分组成:奔腾M计算机,运动控制器,电池管理电路, 8个锂离子智能电池,伺服驱动器和4个。 1 )控制子系统:控件硬件分为三个组成部分:一个专用电路的电池管理,运动控制器,以及一个板上奔腾M计算机运行Debian的Linux系统。 该运动控制器(图5 )是能够驱动4个步进,刷或无刷电机为24伏特的电流处理能力的展示一十五安培。专用数字信号处理器的控制器使得许多议案任务是卸下从车载电脑上,腾出更多的资源用于更高级别的控制任务和传感器处理。 电脑(图6 )以太网通信功能的运动控制器, IEEE 802.11g标准( Wi - Fi )和符合IEEE 802.15.1 (蓝牙)的外部通信。闪存驱动器作为启动设备,并作为一个大容量存储设备的数据收集。努力正在规范的所有平台的分布式机器人实验室机器人的播放服务器。安装播放器和相应的驱动程序正在开发中,使Loper播放的要求。 电池管理电路提供所需要的功率水平的其他子系统,并提供身份信息的液晶显示屏和一个外部的计算机通过串行连接。该电路还结余的负载智能锂离子电池和处理相关的任务与充电。 检测语言 >; 中文(简体) 互换翻译 累死了,就是有一些不会。
相关概念
90
90(九十)是89与91之间的一个自然数,也是一个偶数。该数除了本身之外,其他约数的和为144>90,因此它是过剩数(盈数)。
正转
正转,是天文学专有名词。